









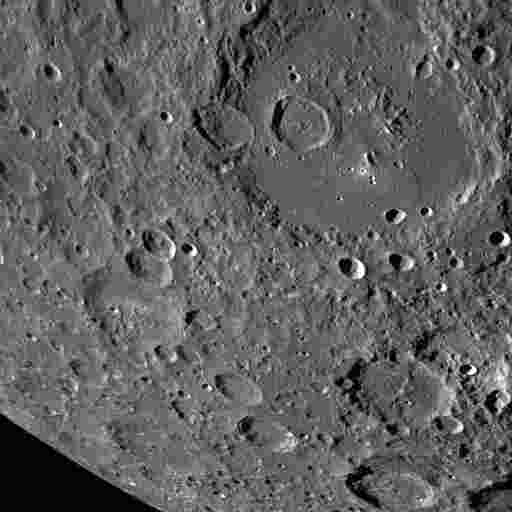


Le sol lunaire vu par la MBC. Il s’agit de la première image de la caméra multispectrale embarquée dans l’atterrisseur SLIM.
@JAXA
Slim recharge ses batteries
Mise à jour du 29 janvier 2024
La JAXA, l’agence spatiale japonaise a indiqué avoir réussi à reprendre contact avec son engin lunaire. «Nous avons réussi à établir la communication avec SLIM hier soir et avons repris les opérations !», précisent les équipes de SLIM sur X (anciennement Twitter). «Nous avons immédiatement commencé les observations scientifiques avec MBC», la caméra multispectrale embarquée dans l’atterrisseur japonais. La JAXA a également publié une image du sol lunaire. Si SLIM peut, à nouveau, travailler, c’est «probablement parce que la production d’énergie de sa batterie solaire a repris alors qu’il était exposé à la lumière du soleil», a expliqué, à l’Agence France Presse, un porte parole de la JAXA. «Nous allons donner la priorité à ce que nous pouvons faire, c’est-à-dire observer et collecter des informations, plutôt que d’ajuster la position de Slim, ce qui pourrait aggraver la situation.»








